Spideybot
Research Work for the Modular Robotics Lab – University of Pennsylvania (2011)

Objective:
The goal was to create a robot that could explore disaster sites that have too much rubble on the ground for wheeled or legged robots. For example, in a collapsed parking garage, this robot would be able to winch itself through, using exposed rebar, pipes, and conduits as it relays video back to a search and rescue team.
Project Details:
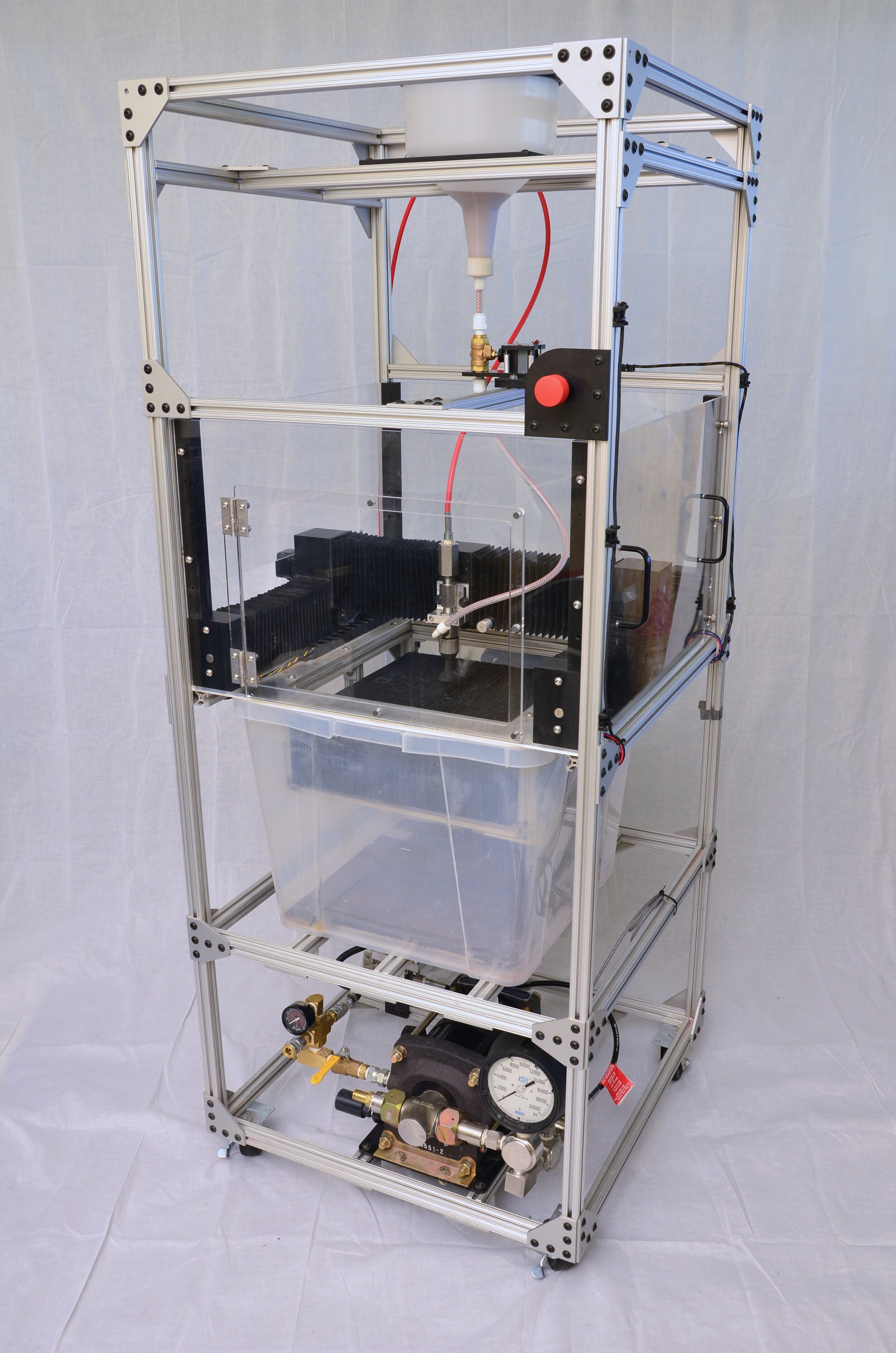
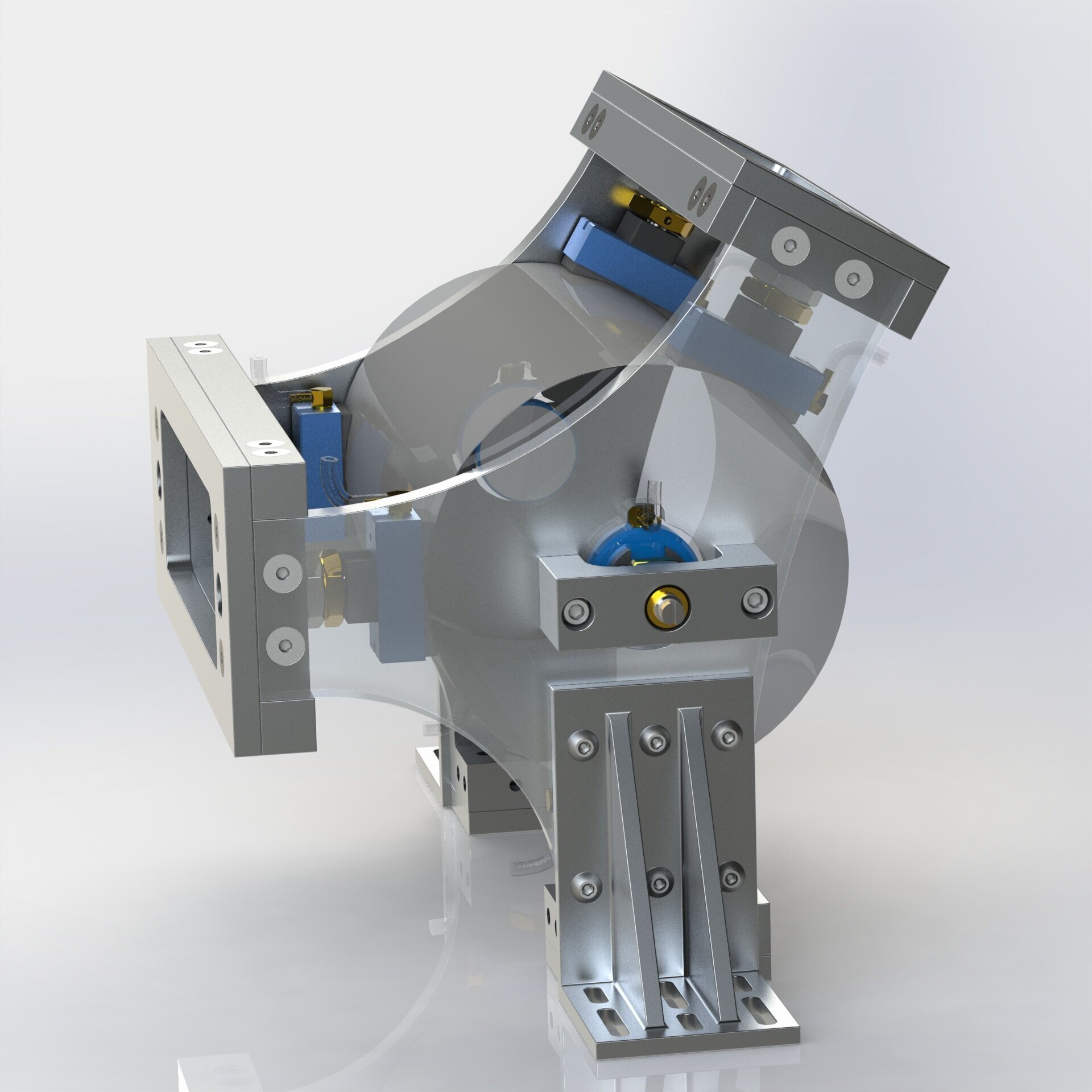
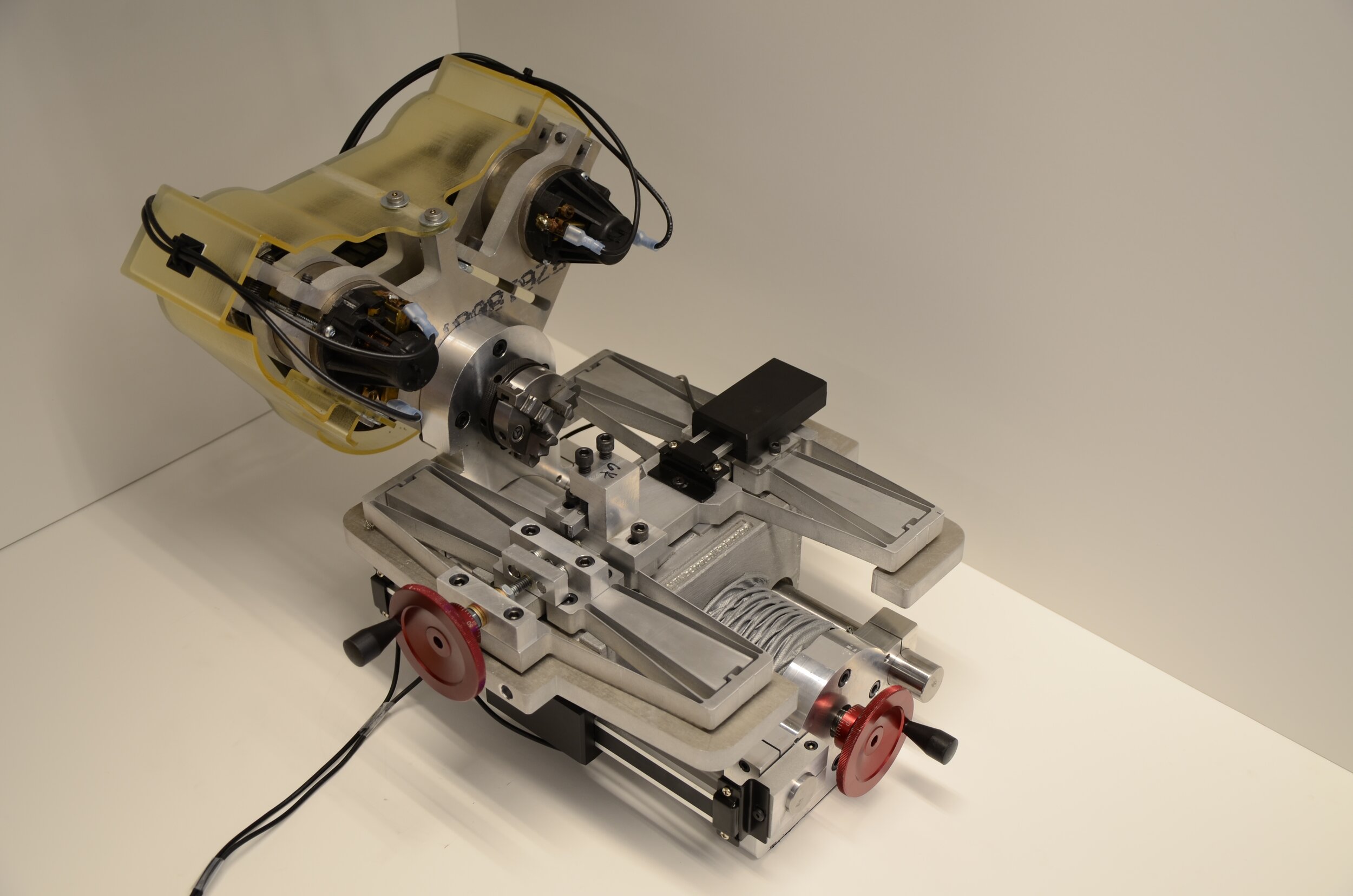
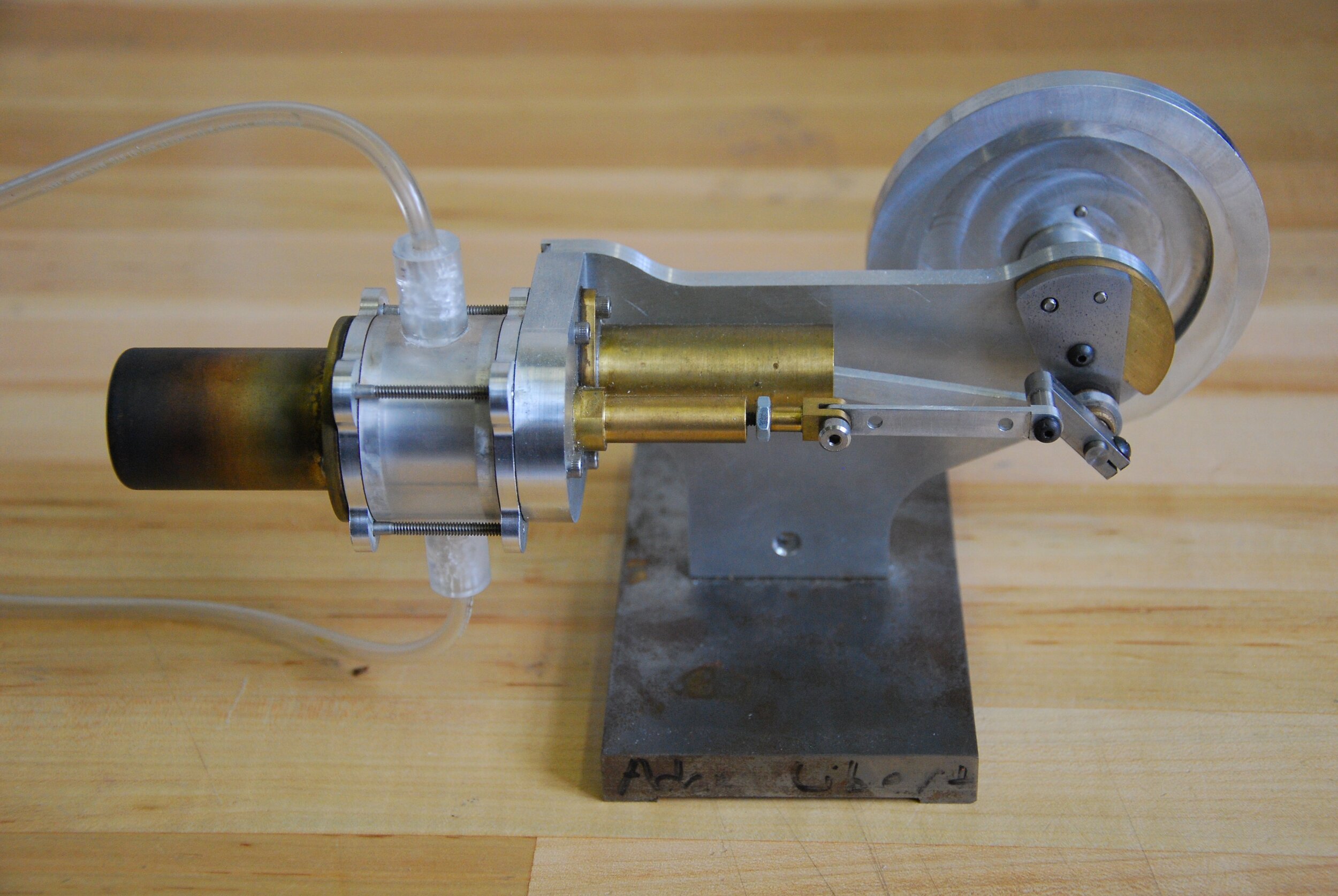
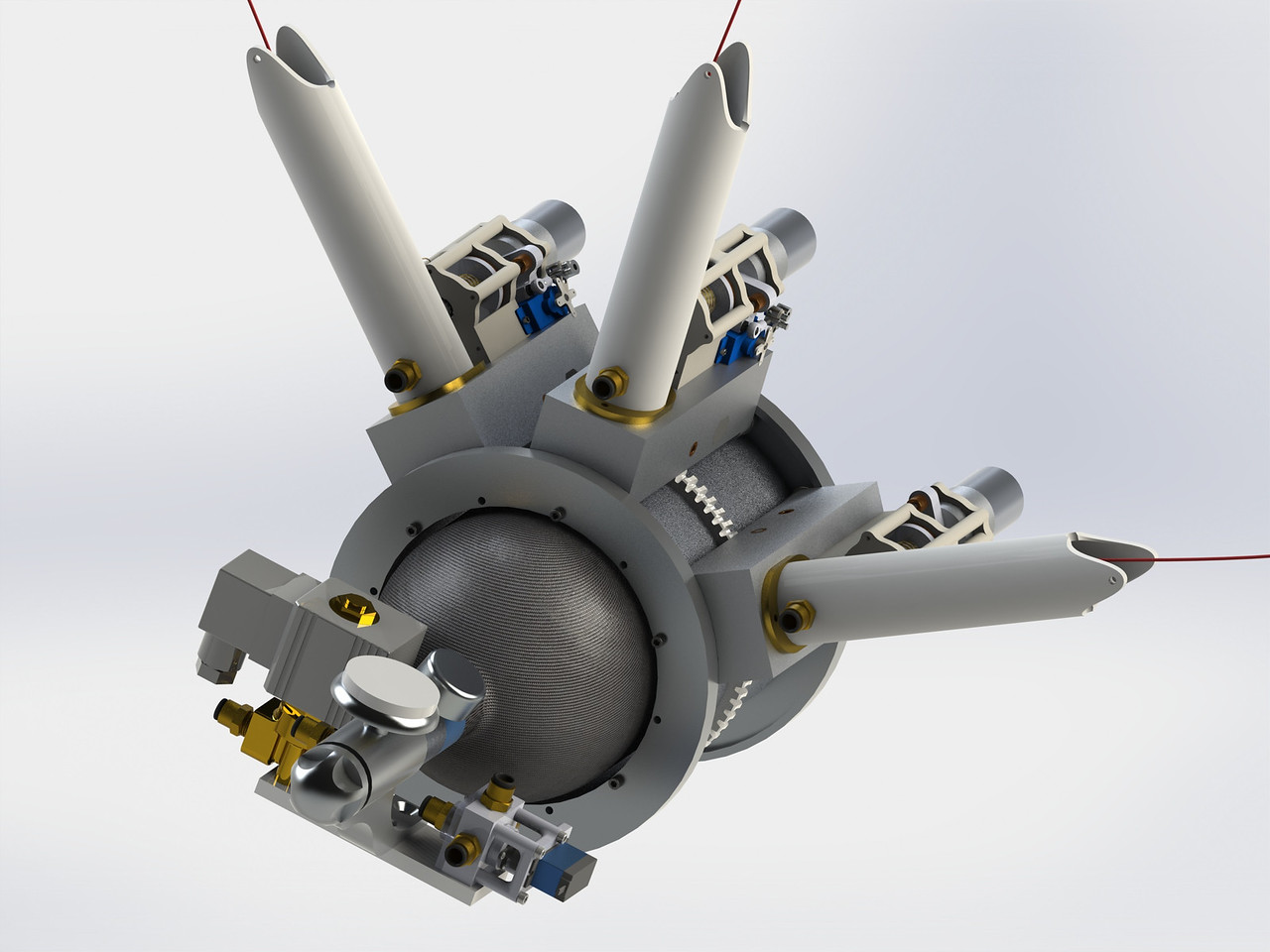
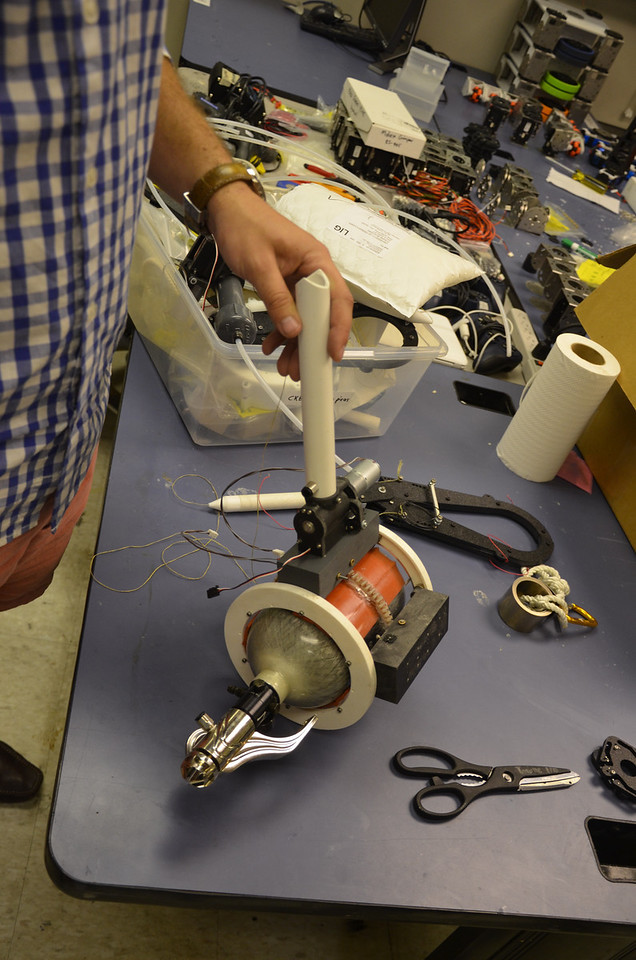
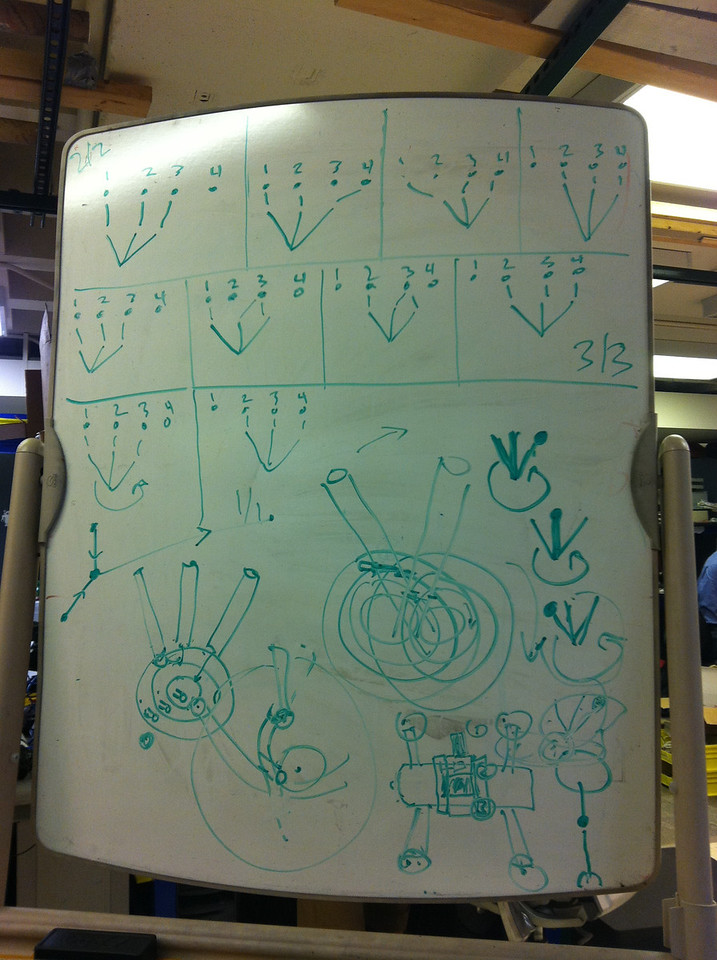
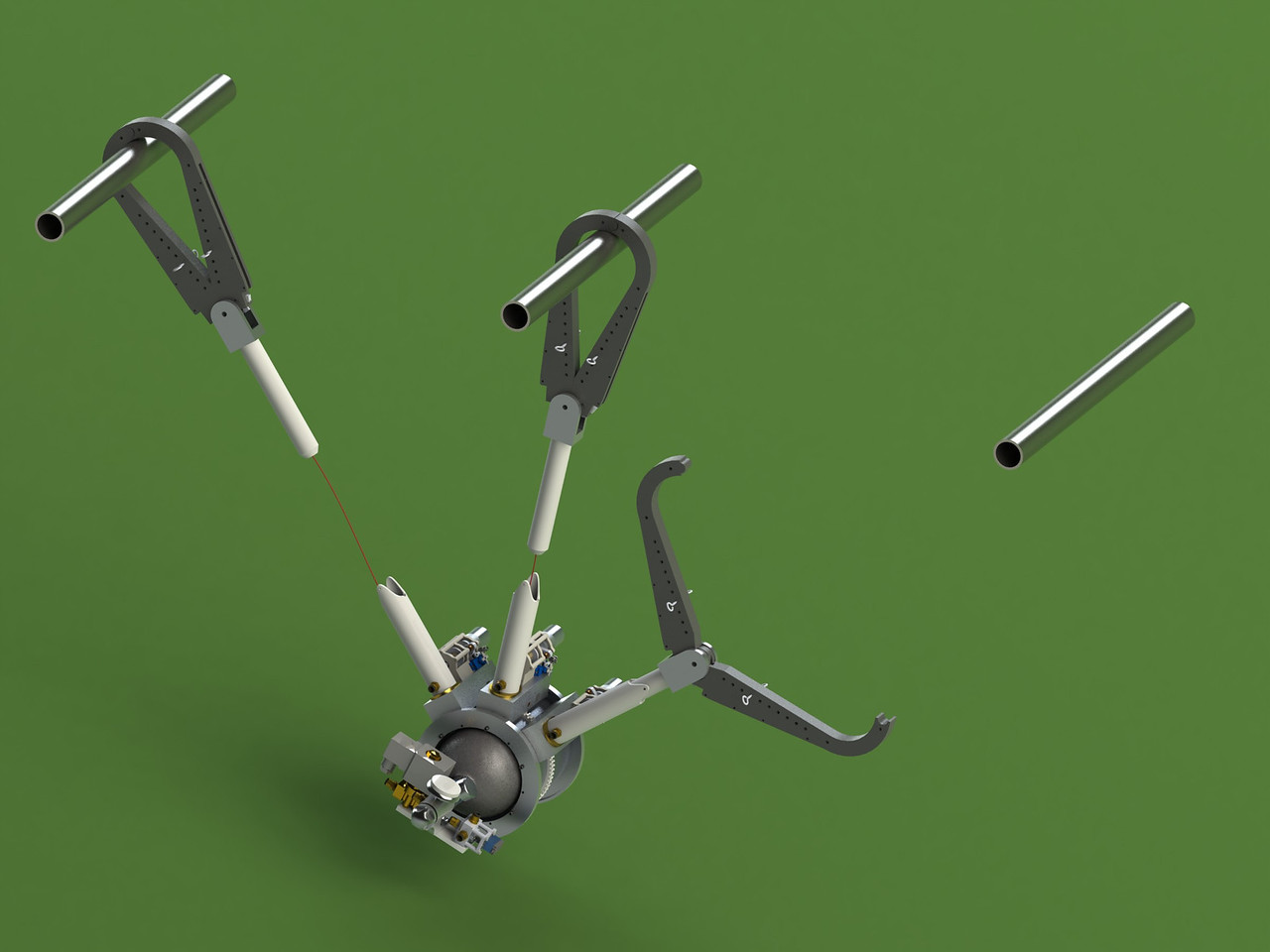
I designed and prototyped the Spideybot, a spiderman-like robot that had the ability to pneumatically launch grippers at the ceiling and swing from one object to the next. Since the robot had to carry its own weight, the project forced me to think critically about factors such as material selection, power sources, and actuation methods. For example, instead of launching the grippers mechanically or electromagnetically, the robot was designed around a carbon fiber 4500psi compressed air tank, which was chosen for its high energy density and ability to easily launch the grippers. I also had to come up with a gait pattern that would allow the robot to swing from object to object while employing the least number of necessary grippers to keep the weight of the robot down. The design I came up with was inspired by my experience that summer at Six Flags. I designed a rollercoaster-like track to be circumferentially wrapped around the air tank for the three gripper-launchers to crawl along.
Results:
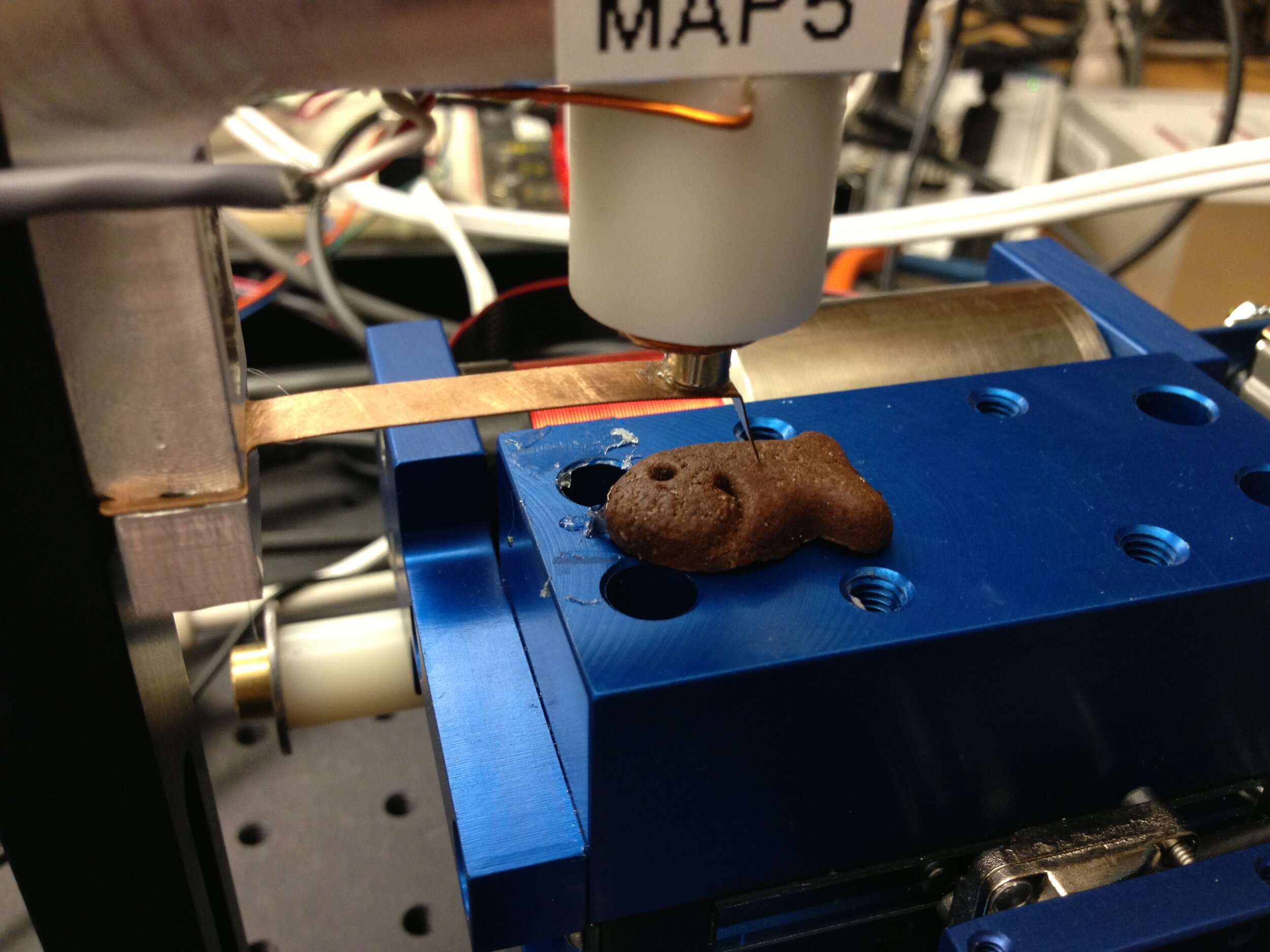
I was able to get most of the sub-systems to work by the end of the summer, and I continued to serve as the team leader when new lab members were brought on to continue my work. After another semester’s work, the Spideybot could successfully launch a gripper at pipes on the ceiling, grab on, support its own weight, and release from them.







additional work projects