Robockey
Mechatronics Final Project – University of Pennsylvania (2011)

Objective:
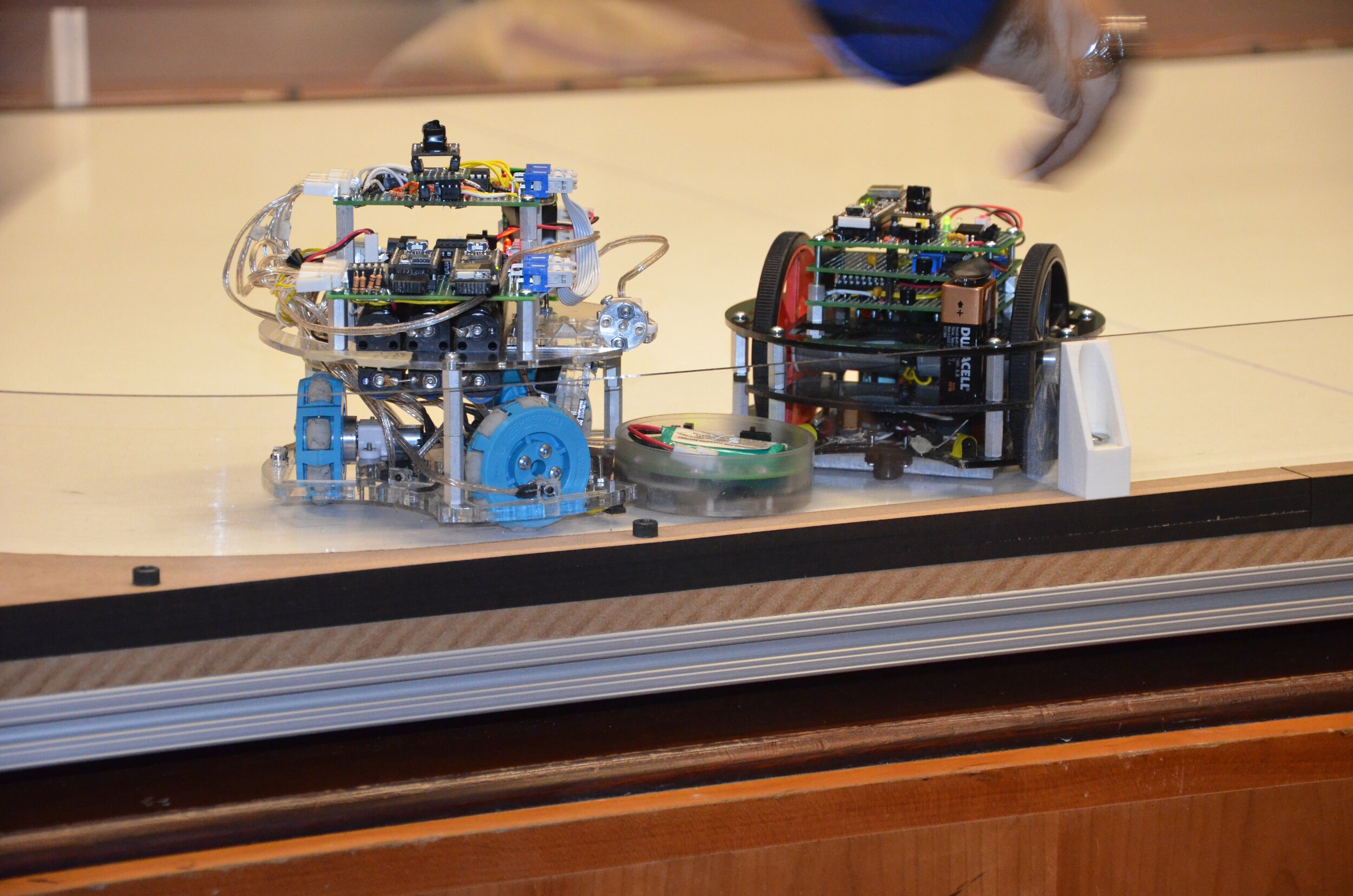
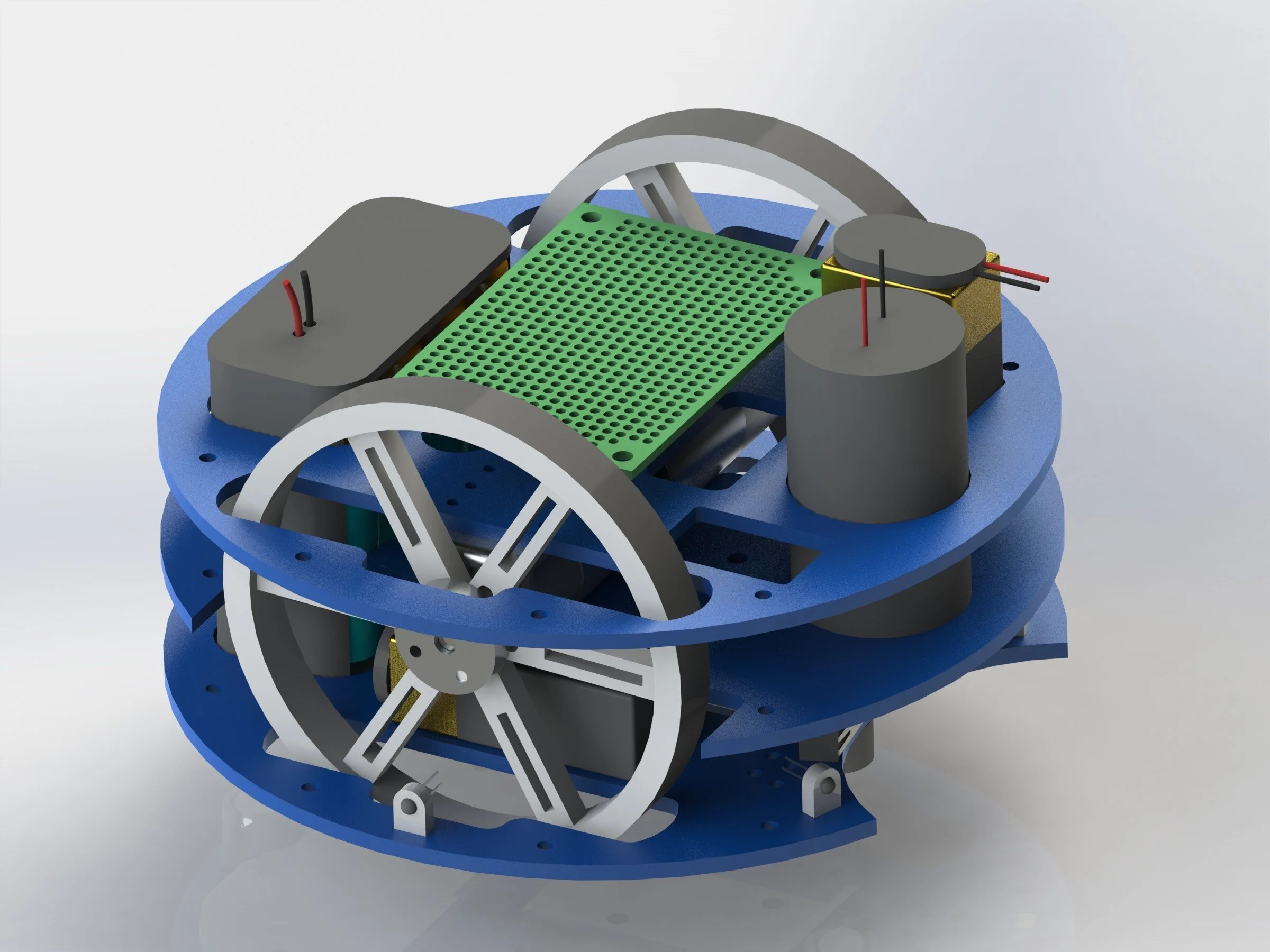
For the final project of this course, we created a team of three fully autonomous hockey-playing robots meant to compete against other groups’ robots in the annual Robockey Cup.
Project Details:
led the mechanical design and did the coding for the robots. We used hacked Wii controller sensors aimed at the ceiling to compute each robot’s position from a constellation of infrared LEDs overhead. As well, I positioned a variety of IR sensors around the circumference of each robot that gave them the ability to track the IR-emitting puck. Using just an Atmel microcontroller to process all this data, our three robots then wirelessly coordinated with each other to find the puck and escort it to the opposing team’s goal. We built in an electronic solenoid to shoot the puck when the robots were close enough to the goal. Our most effective design choice, however, was to simply mount heavy steel blocks to the bottom of each robot, which gave them increased traction on the slippery plastic rink surface and allowed them to push through defending robots on the other team.
Results
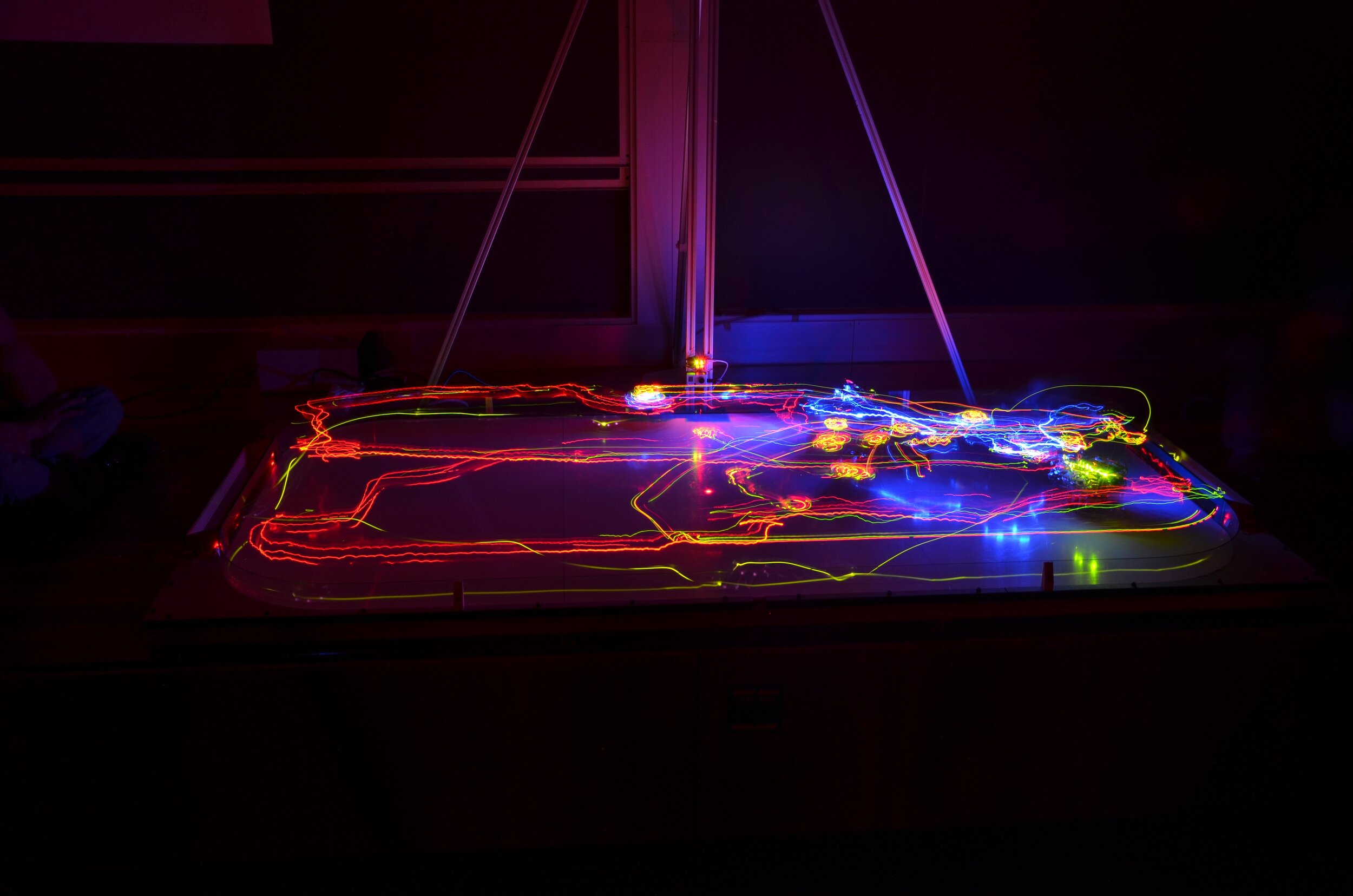
My team’s robots placed in the top four of the tournament bracket, beating out 20 other teams in the class. As well, the Robockey Cup was more exciting than most hockey games I’ve been to, with an entire auditorium of people sitting on the edge of their seats, screaming and cheering for their robots. After the tournament, we turned the lights off and I took some beautiful long-exposure photographs of the robots playing in the dark.












additional work projects